안녕하세요.
세강의 @joonghoonlee입니다.
마실 물을 구매하러 코스트코에 들렀었습니다.
언제? 어제!
아무튼 물만 딱 사서 계산대로 향했습니다.
여러분들은 계산대로 향하며, 어떤 행동과 생각을 하십니까?
저는 빨리 계산하고, 계산대를 빠져 나오기 위해 줄을 선 사람들을 스캔하게됩니다.
먼저 줄의 길이, 카트에 들어있는 물품의 수, 성별, 나이, 단체인지 혼자인지 여부등을
따져서 계산대를 정합니다.
하지만 사람의 감에 의한 이런 선택은 잘 맞지 않는 경우도 많습니다.
step 1.0에서는 정확하고 세세하게 알려드리려다보니 다소 루즈하고
라면받침용 도서를 읽는 느낌을 많이 드린것같아 좀 바꿔보려합니다.
어떻게? 이렇게!!
동영상부터 감상 하시겠습니다.
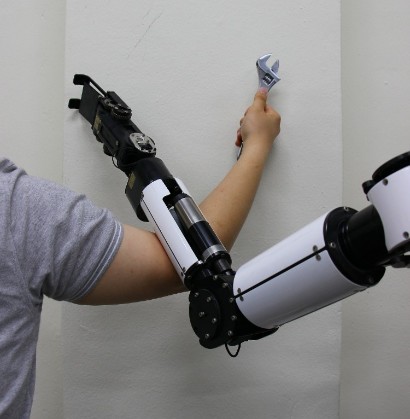
보시면 알겠지만 팔목부분의 검출을 테스트 해보았습니다.(feat.알바생)
동영상에 보이는 test는 아두이노 UNO보드에 생체인식 앰프를 연결한 구조입니다.
즉 조만간 아두이노와 설계한 보드를 연결해 사용하는 법도 알려드릴 예정입니다.
그래도 혹시나 앞서가실 분이 있으시다면, 언제든 오픈입니다~
그런 의미에서
#include <avr/interrupt.h>
#include <SoftwareSerial.h>
SoftwareSerial mySerial(2, 3); // RX, TX
int a = 300; //팔을 움직였을때 근전도 값이 최대로 나오는 값을 입력해야함.
int b = 300;
int c = 300;
void setup() {
Serial.begin(9600);
mySerial.begin(9600);
//////////////////////////////////////////////////////////왼쪽 주먹 초기값
ax12SetRegisterSoft2( 1, AX_GOAL_POSITION_L , 1024 - 100);
ax12SetRegisterSoft2( 2, AX_GOAL_POSITION_L , 0 + 50);
//////////////////////////////////////////////////////////오른쪽 주먹 초기값
ax12SetRegisterSoft2( 3, AX_GOAL_POSITION_L , 0 + 100);
ax12SetRegisterSoft2( 4, AX_GOAL_POSITION_L , 1024 - 50);
//////////////////////////////////////////////////////////회피 초기값
ax12SetRegisterSoft2( 5, AX_GOAL_POSITION_L , 512);
delay(100);
}
void loop() {
// read the state of the pushbutton value:
int sensorValue1 = analogRead(A0);
int sensorValue2 = analogRead(A1);
//int sensorValue2 = analogRead(A2);
// Serial.println(sensorValue1); //왼손
// Serial.println(sensorValue2); //오른속
// Serial.println(sensorValue3); //회피
if (sensorValue1 > a) {
a = sensorValue1;
}
if (sensorValue1 > b) {
a = sensorValue2;
}
// if (sensorValue1 > c) {
// a = sensorValue3;
// }
//////////////////////////////////////////////////////////왼쪽 주먹
if (sensorValue1 > a) {
ax12SetRegisterSoft2( 2, AX_GOAL_POSITION_L , 512);
delay(200);
ax12SetRegisterSoft2( 1, AX_GOAL_POSITION_L , 800);
delay(100);
ax12SetRegisterSoft2( 1, AX_GOAL_POSITION_L , 1024 - 100);
ax12SetRegisterSoft2( 2, AX_GOAL_POSITION_L , 0 + 50);
delay(1000);
}
//////////////////////////////////////////////////////////오른쪽 주먹
if (sensorValue2 > b) {
ax12SetRegisterSoft2( 4, AX_GOAL_POSITION_L , 512);
delay(200);
ax12SetRegisterSoft2( 3, AX_GOAL_POSITION_L , 224);
delay(100);
}
else {
ax12SetRegisterSoft2( 3, AX_GOAL_POSITION_L , 0 + 100);
ax12SetRegisterSoft2( 4, AX_GOAL_POSITION_L , 1024 - 50);
delay(100);
}
//////////////////////////////////////////////////////////회피
// if (sensorValue3 > c) {
// ax12SetRegisterSoft2( 5, AX_GOAL_POSITION_L , 1024 - 200);
// delay(100);
// }
// else {
// ax12SetRegisterSoft2( 5, AX_GOAL_POSITION_L , 512);
// delay(100);
// }
}
void ax12SetRegisterSoft2(int id, int regstart, int data) {
mySerial.write(0xFF);
mySerial.write(0xFF);
mySerial.write(id);
mySerial.write(5);
mySerial.write(AX_WRITE_DATA);
mySerial.write(regstart);
mySerial.write((data & 0xff));
mySerial.write(((data & 0xff00) >> 8));
mySerial.write((0xFF - ((id + 5 + AX_WRITE_DATA + regstart + (data & 0xFF) + ((data & 0xFF00) >> 8)) % 256)));
}
define까지 적기엔 너무 길어 지웠습니다.^^;;
이번엔 삼각근에서의 검출입니다.
보시는 것처럼 잘 나옵니다.
오늘은 간단하고 명료하게 마무리하려합니다.
보셔서 알겠지만
오늘은 동영상이 2개지요~~!!
결론은!! 어제 손가락을 시험했으니, 나머지 부분의 근육들을 시험해본 것을 올렸습니다.
그래서 무척 만족스런 결과가 나왔단 겁니다.
음하하하하하하하하하하하하하하
좀 정비해서 이다음엔 손으로 그림을 그려보는 방법을 사용해보겠습니다;;
다양하고 아름답게 접근하겠습니다.
부산의 오늘은 무척 흐렸습니다.
그와중에도 낭만적인 순간이 머물다 가길 기대합니다.
감사합니다.
아! 이런 방식으로 아바타에 나오는 중령악당이 로봇을 조종하는거군요?
이런 중요한 특급비밀소스를 공개해버리시다니~~~~~~~~인류공영에 이바지하신 겁니다!^^
Downvoting a post can decrease pending rewards and make it less visible. Common reasons:
Submit
누구라도 사용해서 대박나면 그걸로 만족합니다.
아이디어는 무궁무진하니까요 ^^
Downvoting a post can decrease pending rewards and make it less visible. Common reasons:
Submit
오픈 소스에 존경을 표합니다 ㅎㅎㅎ
Downvoting a post can decrease pending rewards and make it less visible. Common reasons:
Submit
학부시절 예제할만한 소스 찾던 아픔이 떠올라서 올려보았습니다.
Downvoting a post can decrease pending rewards and make it less visible. Common reasons:
Submit
우와 신기합니다. 아두이노 관심은있었는데 활용도가 엄청나군요...
그런데 공개하신 저 코드는 아두이노 어디?!에 얹는 건가요?!
또 생체인식 앰프도 직접 제작하시는건가요?!
신기하니 궁금한 점이 생깁니다 ㅎㅎㅎ
Downvoting a post can decrease pending rewards and make it less visible. Common reasons:
Submit
아두이노 UNO모델을 사용했습니다 ㅎㅎ이 질문에 대해서는 한시간뒤에 그냥 포스팅을 해서 알려드리겠습니다. 이런 덧글 너무 설레고 좋습니다 ㅎㅎ감사합니다 ㅎㅎㅎ
Downvoting a post can decrease pending rewards and make it less visible. Common reasons:
Submit