TROVARSI SU MARTE
Sistemi di localizzazione e orientamento
CC0 CREATIVE COMMONS

BASE "ROVER comunica la tua posizione..."
ROVER "Qui ROVER, mi trovo qua al dirupo..."
BASE "Quale dirupo?"
ROVER "Questo dirupo... vicino alla roccia a forma di piramide"
BASE "Ma sei andato a destra o sinistra?"
ROVER "A destra di che?!? BASE...?!?"
... rumore di fondo...
Questa è una ipotesi poco probabile e, poco "professionale", di una comunicazione via radio fra una BASE e un ROVER in una ipotetica missione di perlustrazione sul pianeta rosso. Però il problema di capire dove si è rispetto alla BASE o sapere in che posizione è il ROVER, anche rispetto ad un'altro ROVER, risulta essere una informazione di particolare rilevanza. Tutti noi se usciamo di casa, basta accendere un GPS (Global Positioning System) e abbiamo in mano le informazioni sulla nostra posizione a livello globale con accuratezza di qualche metro!. Il ché è fantastico per mille applicazioni diverse... siamo in una nuova città e cerchiamo il museo della Scienza, abbiamo camminato tanto e non ci ricordiamo dov'è la nostra macchina, facciamo delle escursioni fuori da strade segnate in mappa...
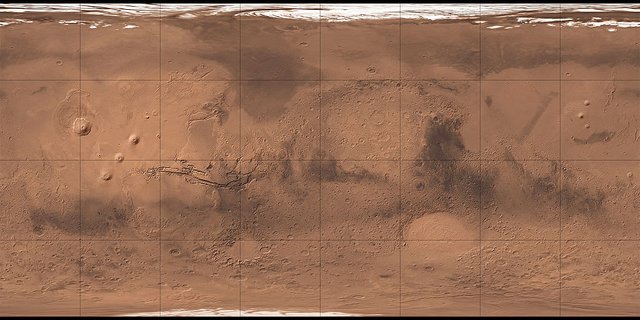
CC0 CREATIVE COMMONS
Molte spedizioni scientifiche hanno già raccolto dati preziosi della superficie di Marte. Già la prima mappa globale di Marte è stata prodotta da Scott e Carr nel lontano 1978, i ricercatori avevano utilizzando immagini di lunghezza d'onda visibile del Mariner 9 (risoluzione di 2-3 km / pixel).1 Poi l'evoluzione e il progresso degli strumenti di oggi, permette di avere un data-base di informazioni veramente di alto livello, uno fra tutti il risultato della mappa geologica del pianeta Marte visibile da questo link. Le mappe di base utilizzate per la mappatura geologica sono:2
- Mars Global Surveyor (MGS)
- Mars Orbiter Laser Altimeter (MOLA) modello di elevazione digitale del terreno (DEM) (risoluzione di 463 m / pixel a latitudini inferiori a 115 m / pixel vicino ai poli)
- sistema di imaging a infrarossi (IR) di Mars Odyssey (ODY)
- Thermal Emaging Imaging System (THEMIS)
Bene! Abbiamo anche la mappa per orientarci! Abbiamo tutto allora. Non proprio... Anche se abbiamo una mappa iper dettagliata a nostra disposizione, non sempre le informazioni rispecchiano la realtà. Questo per un fatto che l'osservatore ha sempre un punto di vista differente rispetto a quello che c'è rappresentato sulla mappa, e proprio da questa sua visuale diretta percepisce informazioni differenti. Se ad esempio navighiamo in macchina in una strada di montagna, il nostro GPS sarà in grado di dirci che fra 50m abbiamo un tornante destro ma chi guida potrebbe percepire che deve modificare il percorso perché il muro di sostegno lo vede danneggiato e pericolante. Le informazioni che percepisce il soggetto sono diverse rispetto a quanto mappato. Inoltre su Marte dobbiamo per forza un sistema di riferimento da cui partire... in pratica se vogliamo orientarci e capire a quale distanza è un oggetto X rispetto a un punto Y dobbiamo avere uno zero (o meglio, origine degli assi cartesiani).
Penso che se in un futuro prossimo abbiamo una prima base sul pianeta rosso possa essere interessante creare un punto di coordinate 00,00,00 proprio al centro della BASE.
Mhmm... qui ci vuole un passo successivo... non ha importanza dove sono orientati gli assi del nostro sistema di riferimento ma bensì come posso sviluppare un sistema che mi possa calcolare le coordinate. E quindi?!?
La trilaterazione è una tecnica di rilievo o comunque di calcolo delle distanze sfruttando le proprietà dei triangoli (figura rigida) e in più generale il campo della topografia. La tecnica della trilaterazione comunque ha dei limiti, in quanto per definizione la trilaterazione va bene quando operiamo su un piano, ma come ben noto Marte come la Terra è tutto fuorché un piano... infatti si parla di Campo geodetico... anzi no! siamo su Marte! Campo Marziadetico... vi piace?!?
Comunque anche in topografia fino a certe distanze (dai 10 ai 25 Km) possiamo sostituire il campo geodetico (o anche sfera locale) con un piano tangente e normale alla sfera locale stessa.3 Su Marte questo problema non sussiste per alcune ragioni pratiche. L'informazione a noi importante è sapere:
- se un ROVER è in difficoltà e quindi risalire alla sua posizione per assistenza
- marcare una certa zona che dal punto di vista geologico risulta essere interessante
- mappare le zone di pericolo
- creare un percorso sicuro per una determinata area
in tutte queste situazioni avere informazioni geografiche (...marziagrafiche...) con precisioni del cm non ha assolutamente senso, una accuratezza della posizione di uno, due o tre metri soddisfa le esigenze di chiunque.
Il sistema di localizzazione che si potrebbe attuare, potrebbe essere quello di installare una serie di antenne in modo tale che in un qualsiasi punto all'interno dell'area di copertura delle antenne stesse sia raggiunte da un ROVER. Sapendo la posizione (conoscendo quindi le coordinate) di due antenne e il ROVER riesce a vederle tutte e due, ecco che posso attraverso dei semplici calcoli topografici conoscere la mia posizione. Se ho a disposizione un sistema di misurazione delle distanze, come il sistema (EODM Electro Optical Distance Measurement) con un semplice passaggio matematico posso risalire alla mia posizione. Il sistema è fattibile anche andando a misurare solamente gli angoli. Come accennato in precedenza, la trilaterazione sfrutta la proprietà dei triangoli, risulta abbastanza intuitivo che se conosco la dimensione di un lato e misuro gli altri due, esiste un solo triangolo con quelle determinate grandezze.
Indubbiamente il numero di antenne è determinato dall'orografia della zona, ma possiamo fare un ragionamento di quali dimensioni e portata potrebbe avere un antenna. Se noi osserviamo l'orizzonte del mare e si sta avvicinando verso di noi un veliero, noteremo che per primo vedremo l'albero maestro e poi lo scafo della nave.... ovviamente! perchè siamo d'accordo che la terra è rotonda. Ecco che se noi osserviamo un'antenna e man mano ci allontaniamo, ne vediamo solo una parte sempre minore al crescere con la distanza. Su Marte questo effetto è più pronunciato in quanto il pianeta è molto più piccolo della Terra. Marte ha un dimetro all'equatore di circa 6800 Km,4 poco più della metà di quello terrestre.
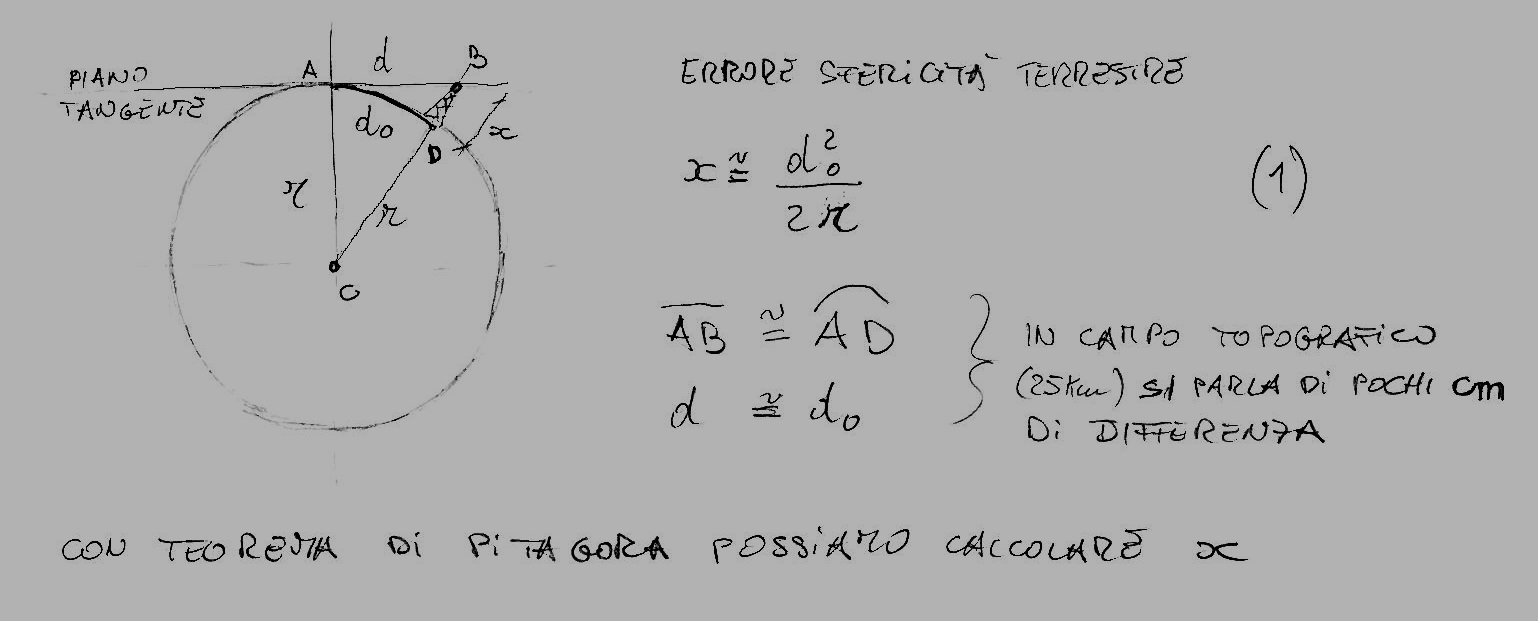
IMMAGINE DELL'AUTORE
Dalla formula (1) e disegno in figura possiamo calcolare che per un raggio d'azione di un'antenna di 20Km (in questo caso corrispondente alla distanza d della formula) abbiamo bisogno di un'antenna alta almeno 58.80m corrispondente a x.
Ecco come potrebbe essere una distribuzione tipo delle antenne.
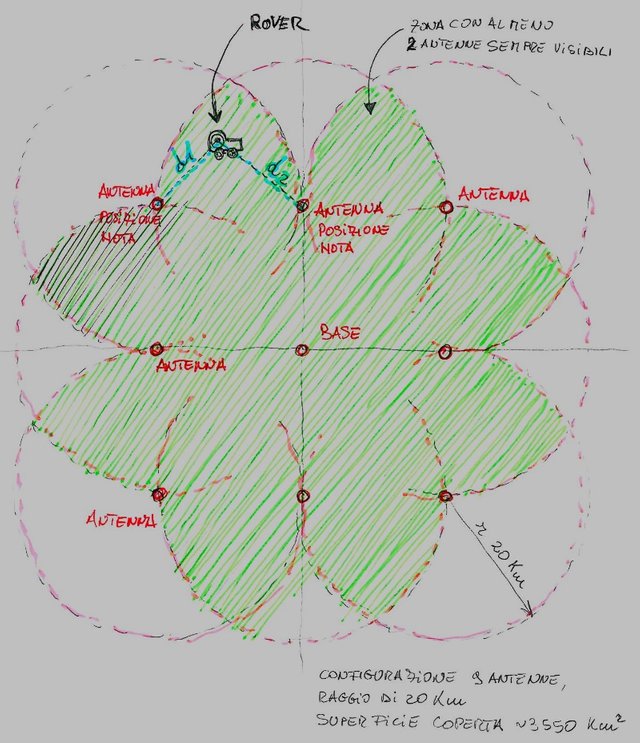
IMMAGINE DELL'AUTORE
Questo potrebbe essere un sistema con nove antenne disposte a scacchiera attorno alla nostra BASE. Naturalmente la natura dell'orografia presente potrebbe comportare delle complessità nello schema. Se pensiamo di perlustrare un profondo canyon la distribuzione delle antenne sarebbe molto più complessa. Però uno schema di questo tipo e con l'utilizzo di nove antenne di altezza di almeno 58.80 m possiamo coprire una superficie di ben 3550 Km quadrati.
CONCLUSIONI
Indubbiamente la tecnologia moderna ha altri strumenti di rilievo molto più avanzati. Se pensiamo ai sistemi di rilevamento Scanner 3D, sistemi LIDAR o semplicemente l'evoluzione della fotogrammetria negli ultimi anni, adottare tecnologie che sono alla base della topografia potrebbero essere quasi convenzionale e scontato. Ma comunque tutti i sistemi moderni di rilevamento hanno in comune quella semplicità dell'utilizzo della trigonometria... per determinare la posizione di un punto servono distanze, zenit e azimut.
Se per andare su Marte serve un topografo... io sono presente! :)
Nota 1: Geologic Map of Mars 2014 pag. 1
Nota 2: Geologic Map of Mars 2014 pag. 3
Nota 3: Manuale Cremonese del Geometra, Sezione Topografia cap. 98 pag. 3
Nota 4: Marte Astronomima su Wikipedia
Being A SteemStem Member
Downvoting a post can decrease pending rewards and make it less visible. Common reasons:
Submit
Immagine CC0 Creative Commons, si ringrazia @mrazura per il logo ITASTEM.
CLICK HERE AND VOTE FOR DAVINCI.WITNESS
Downvoting a post can decrease pending rewards and make it less visible. Common reasons:
Submit
grazie @davinci.times
Downvoting a post can decrease pending rewards and make it less visible. Common reasons:
Submit
Davvero bravo! il tuo post mi e' piaciuto molto e apprezzo anche l'impegno! Sicuramente ci vuole un topografo, mi ha fatto ridere il titolo di una delle tue fonti "manuale cremonese del geometra" e' diverso dal manuale toscano? :) Comunque sei stato precisissimo ad indicare pagina e capitolo, non tutti lo fanno ma tu hai fatto davvero bene tutto!
Downvoting a post can decrease pending rewards and make it less visible. Common reasons:
Submit
Grazie troppo gentile. Devo migliorare comunque la formattazione e anche la bibliografia. L'editor, purtroppo, non aiuta molto
Un saluto, nicola
Downvoting a post can decrease pending rewards and make it less visible. Common reasons:
Submit
Complimenti, ottimo post ;)
Downvoting a post can decrease pending rewards and make it less visible. Common reasons:
Submit
Grazie @deadsvils, gentilissimo
Downvoting a post can decrease pending rewards and make it less visible. Common reasons:
Submit